Emergency Navigation System in Indoor 3D Environment
Goal
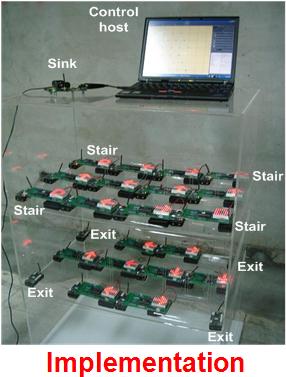
Implementation an emergency guiding system in indoor 3D environments by
wireless sensor networks. When emergencies occur, we can quickly find safe escape
paths
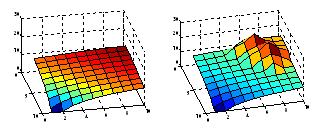
Emergency Guiding
Water toward low spot
Hazardous regions
Distributed adjust weight to find escape path
Tree Reconstruction
Support reliable reporting scheme, when emergencies occur
Dynamically recover the failure links
Low cost and quick convergence
A Load-Balanced Guiding Navigation Protocol in Wireless Sensor Networks
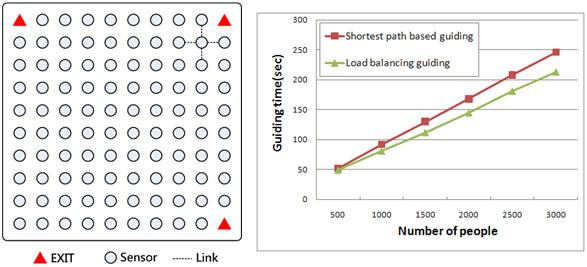
We propose a distributed guiding navigation protocol that can guide moving objects
to multiple exits with load balancing among multiple navigation paths to the exits. With
the assistances of sensor nodes, moving objects are guided to different navigation paths
so that they can move to exits as soon as possible without causing congestion. In some
traditional navigation algorithms, a sensor may select a wrong guiding direction when
an information-updating packet has not flooded through the whole network. Hence, the
guiding direction of the sensor may oscillate in a short time and guided objects will
confuse with this phenomenon, called direction oscillation problem. This problem will
be eliminated in our proposed protocol. Simulation results indicate that our protocol
can guide moving objects to exits in shorter time and solve the direction oscillation
problem effectively.
Main achievements and outcomes
Research or technology outcomes
The previous works do not consider the congestion problem
and the direction oscillation problem is not mentioned before. Our proposed
protocol can solve these two problems efficiently.
Providing Group Tour Guide by RFIDs and Wireless Sensor Networks
We proposes a new application framework for group tour guiding services based on RFIDs
and wireless sensor networks. We consider a sensing field mixed with multiple independent
tourist groups, each with a leader and several members. Members of a group will follow the
moving path of their leader, but may occasionally roam around randomly based on their interest.
Sensor nodes have to track leadersĪ” locations and maintain following paths from members
to leaders. A member may ask where his/her leader is, and a leader may Ī¦recall" his/her
members. We propose a feasible solution to such an application by using existing technologies.
A group guiding protocol is presented. The design enables reliable group guiding at low cost
and low traffic load. Our prototyping system is discussed.
Main achievements and outcomes
Research or technology outcomes
The idea of group guiding has not been discussed in the previous
works. We also developed a prototyping in the National Tsing Hua University. And we demo
our system in IPSN 2007.